Golfing Mechanism
The specific requirements for our shooter were:
During the design process we considered and prototyped several methods of launching Nerf balls, from spinning fly wheels, catapults, pneumatic actuation, and sling shots. Ultimately we decided that the above methods would not meet our requirements, even though some designs such as the spinning wheel could consistently launch balls we wanted a more unique shooter since most of the other groups were using some variation of a spinning wheel to launch the Nerf balls.
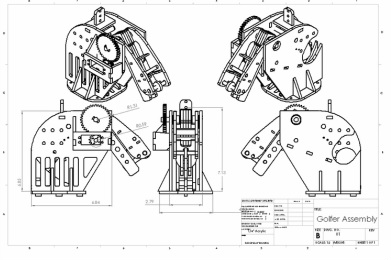
The design that we settled on was inspired by the motion of a golfer to precisely hit golf balls. The unique design that we settled on was able to meet all of our design criteria, and we were very satisfied with the robustness of the Golfing mechanism. Our design consists of a "Golf Club" attached to an extension spring, when the club is raised back the spring is elastically stretched supplying the golf club with a consistent potential energy to deliver to the Nerf ball. The club is raised by a cocking arm which (actuated by a continuous rotation servo) latches on to the golf club and pulls it back to different heights to achieve controlled launching of Nerf balls. A latch controlled by a micro servo releases the golf club when it is raised to the appropriate height for the desired shooting distance. Then the cocking arm comes back down and relatches onto the golf club so the process can be repeated again.
In order to maintain a high level of accuracy in our golfer, we needed to ensure that the golf club would travel the exact same path every time it was released. To achieve this we mounted the golfer on three ball bearings along the main pivot axle. The cocking arm was securely fastened to the pivot axle using spider couplers. We used spacer washers between the housing, cocking arm, and golf club, to confine the rotation of each component to a single plane. This ensured that there would be no slop in our system, for consistent ball launching.
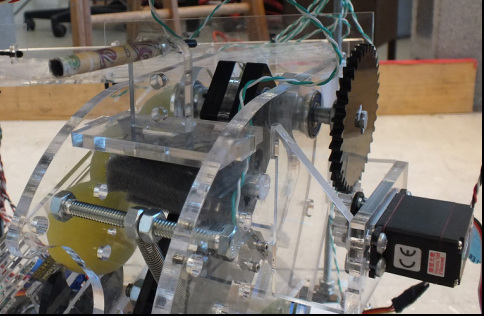
To enable our cocking arm to have enough torque to overcome the force from the spring loaded club we laser cut acrylic gears, which gave our actuating 360 servo a 2.4:1 mechanical advantage.
- The shooter must be highly accurate and consistent.
- The shooter should be able to hit targets at any distance from 2' - 6'.
- The shooter should be capable of hitting balls at any position on the board with out the G-bot having to drive to a new location.
- We wanted our design to be unique and mechanically interesting.
During the design process we considered and prototyped several methods of launching Nerf balls, from spinning fly wheels, catapults, pneumatic actuation, and sling shots. Ultimately we decided that the above methods would not meet our requirements, even though some designs such as the spinning wheel could consistently launch balls we wanted a more unique shooter since most of the other groups were using some variation of a spinning wheel to launch the Nerf balls.
The design that we settled on was inspired by the motion of a golfer to precisely hit golf balls. The unique design that we settled on was able to meet all of our design criteria, and we were very satisfied with the robustness of the Golfing mechanism. Our design consists of a "Golf Club" attached to an extension spring, when the club is raised back the spring is elastically stretched supplying the golf club with a consistent potential energy to deliver to the Nerf ball. The club is raised by a cocking arm which (actuated by a continuous rotation servo) latches on to the golf club and pulls it back to different heights to achieve controlled launching of Nerf balls. A latch controlled by a micro servo releases the golf club when it is raised to the appropriate height for the desired shooting distance. Then the cocking arm comes back down and relatches onto the golf club so the process can be repeated again.
In order to maintain a high level of accuracy in our golfer, we needed to ensure that the golf club would travel the exact same path every time it was released. To achieve this we mounted the golfer on three ball bearings along the main pivot axle. The cocking arm was securely fastened to the pivot axle using spider couplers. We used spacer washers between the housing, cocking arm, and golf club, to confine the rotation of each component to a single plane. This ensured that there would be no slop in our system, for consistent ball launching.
To enable our cocking arm to have enough torque to overcome the force from the spring loaded club we laser cut acrylic gears, which gave our actuating 360 servo a 2.4:1 mechanical advantage.
Firing Sequence:
Actuating our shooter is quiet complex and takes several steps working in concert to precisely launch Nerf balls.
Golfing Shot in Slow Motion
Step 1: Loading The Ball

Ball Loader
The first step in the firing process is loading a single Nerf ball into the shooter. To accomplish this a micro Servo (HXT900) steps a circular cross-section, with a ball size cutout. This allows balls to be loaded into the shooter one at a time.
Step 2: Rotate Turret to Correct Angle

Turret Assembly
To meet our requirement of being able to hit any target without moving our bot we decided to mount our entire shooting assembly on a turret controlled by a 180 degree position servo (Hitec HS-322). This enabled our shooter to locate targets independently of the orientation of our bot.
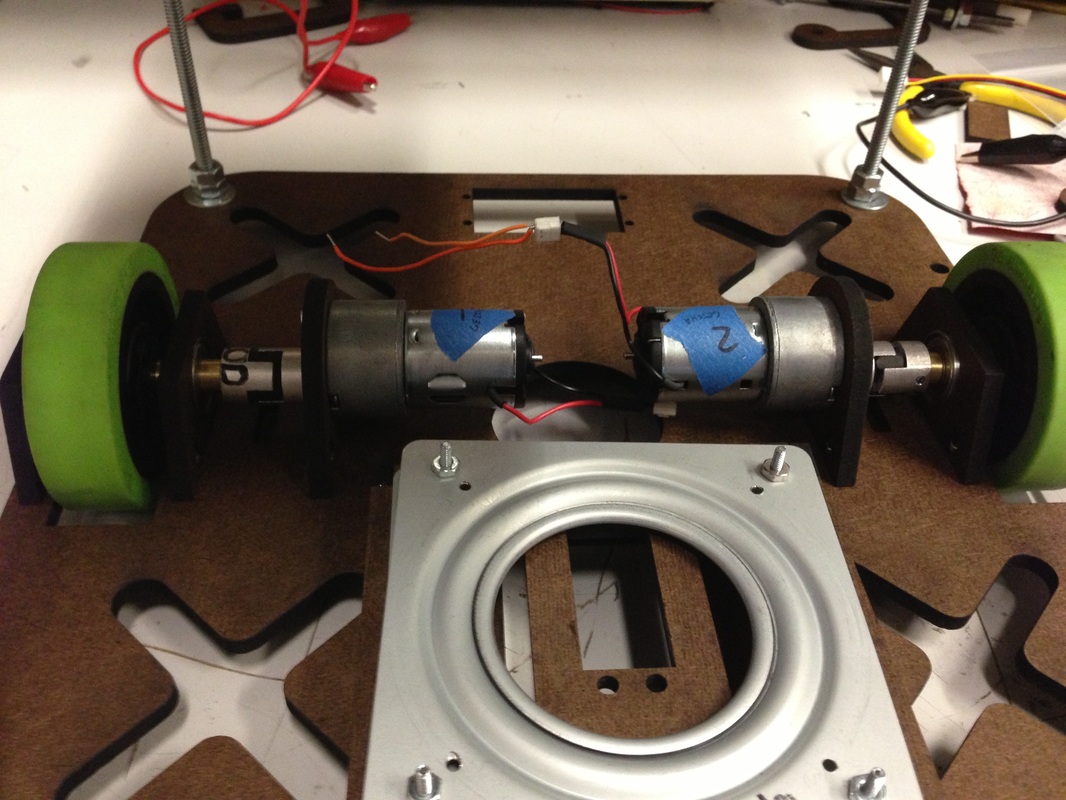
To minimize friction effects and decouple the load of the Shooting assembly from the servo, we mounted our shooter onto a Lazy Susan. We designed a custom servo horn adapter plate to allow the servo to rotate the Shooter.
Our Turret Code can find the angle between our bot's orientation and the desired target, and then rotate our Shooter to the desired angle, so that we can shoot at a target without moving our bot.
To minimize friction effects and decouple the load of the Shooting assembly from the servo, we mounted our shooter onto a Lazy Susan. We designed a custom servo horn adapter plate to allow the servo to rotate the Shooter.
Our Turret Code can find the angle between our bot's orientation and the desired target, and then rotate our Shooter to the desired angle, so that we can shoot at a target without moving our bot.
Assembling Turret
Step 3: Back Swing
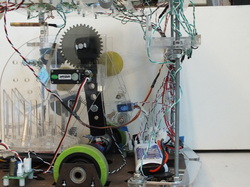
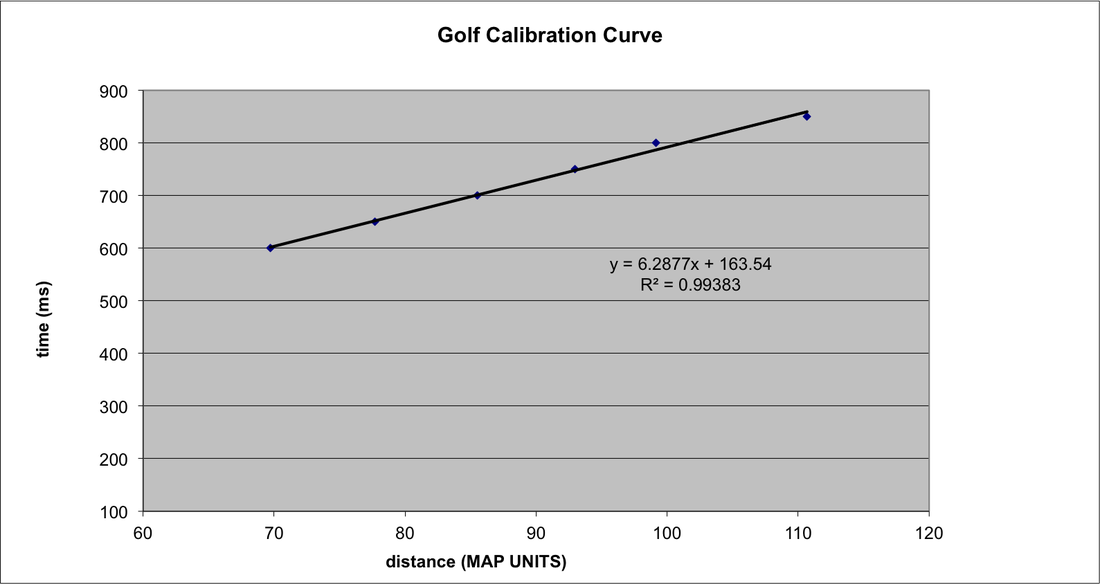
After the turret correctly aims the Golfing Mechanism at the target, the actuating 360 servo drives the gear directly mounted to the drive shaft. This brings back the cocking arm which is securely mounted to the drive shaft via spider couplers. Since the golf club is latched to the cocking arm, this also raises back the golf club and stretches the tension spring which supplies the energy for ball launching. Distance was controlled by allowing the servo to drive the club back to different heights, which was measured in time the servo was on for the back swing. Below is the calibration curve for the Golfing Mechanism, which gave us an accurate linear relation between back-swing time and launch distance. This is controlled by code with a 1 ms resolution timer.
Step 4: Release Club (Fire)

Golf Club released
After the back-swing time expires for the desired launch distance, a micro Servo (HXT500) releases the latch holding up the golf club. The spring's restoring force rapidly brings down the golf club in the follow through, launching the Nerf ball in a very accurate and repeatable manner.
Step 5: Relatch Golf Club

In the final step the cocking arm is brought back down to re-latch onto the golf club. When this occurs, the cocking arm trips a limit switch, which stops the actuation from the driving servo. This completes the shooting process, and the golfer is ready to be fired again.
