Golfer Bot Reloading
Nerf Ball Management
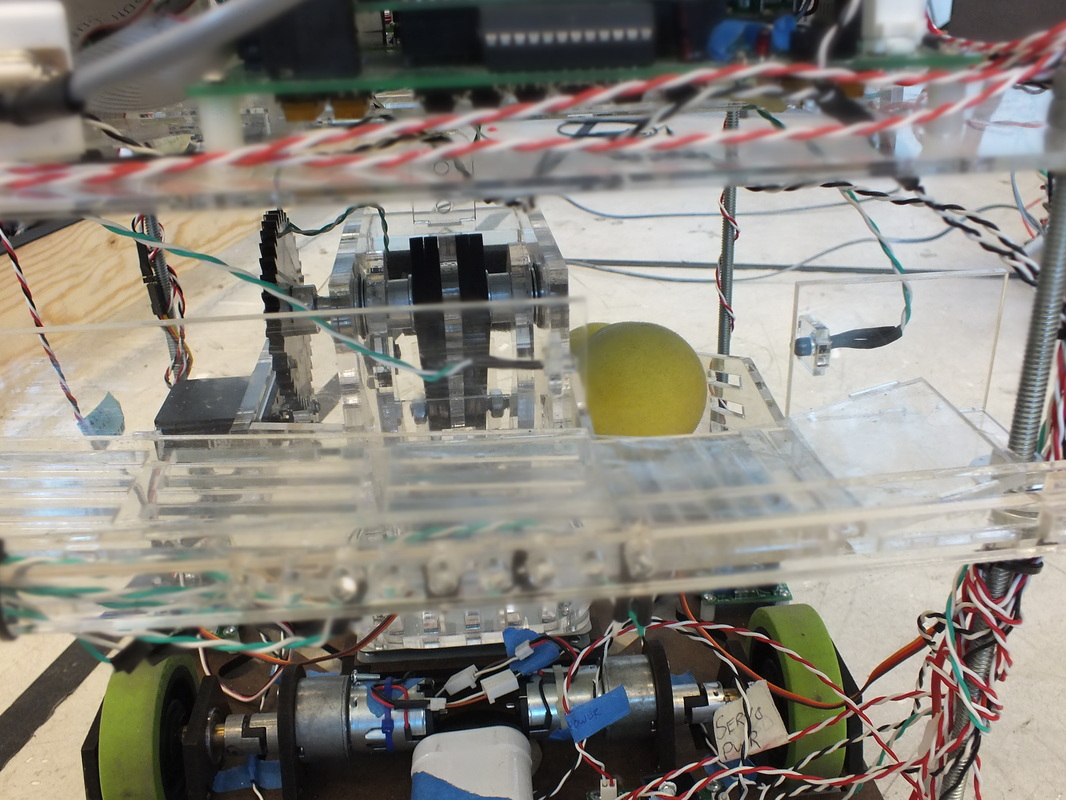
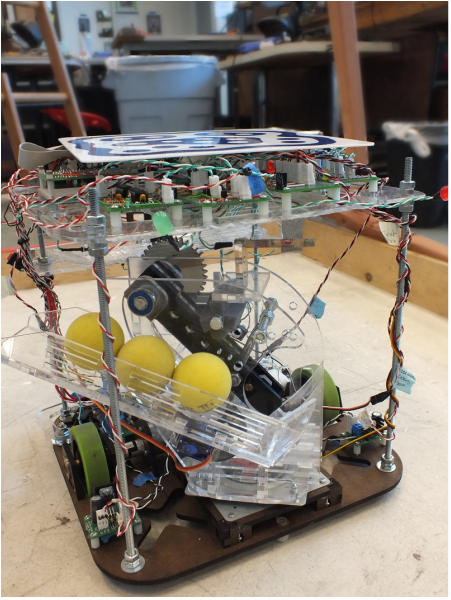
In order to reload balls we pulsed IR emitting LED's with a 10ms high time and 20 ms low time at the ball resupply depot. We designed our ball catcher to be capable of receiving a ball at any point along the back side of our robot, so that if we had any misalignment issues, our robot would still be able to get the ball to our shooter. The balls would then roll down the ball catcher onto the ball hopper, which was mounted to the side of the shooter enabling our golfer mechanism to reload while rotating independently from the ball catcher. The balls in the ball catcher would then be reloaded one at a time into the fire position via a micro servo. We detected the event of recieving a ball with an IR Beam Break circuit, mounted where the balls fall onto the ball hopper.