Bump Sensor Circuits
Please click on the above image to see a higher resolution circuit diagram.
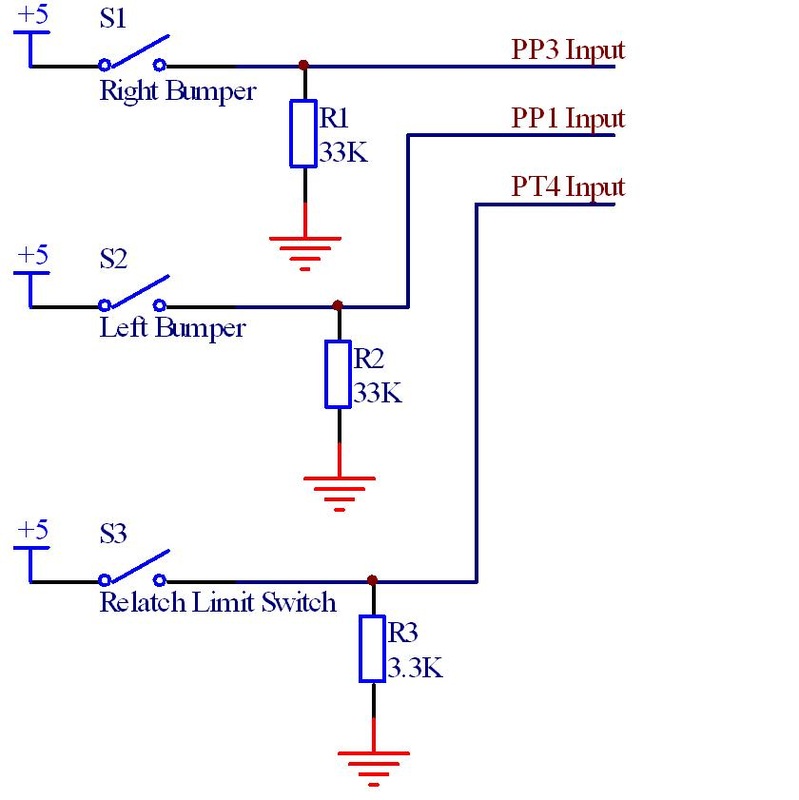
Three separate bumper switches were used in the GBot. Two of these were implemented on the outer edge of the bot, on the back left and back right, to provide a physical indication to the bot when it had docked into the resupply depot. The area by the resupply depot was camouflaged from the camera above the playing field, so a different, reliable way of sensing when the GBot was positioned flush against the resupply depot to properly receive a Nerf ball was required.
The other bumper switch, the relatch limit switch, was used to indicate when the cocking arm had reached its forward limit inside of the shooting mechanism. Both of these limit switches were connected with simple pulldown resistors to read a digital LO when the switch was not engaged, and a digital HI when the switch was pressed down.
The other bumper switch, the relatch limit switch, was used to indicate when the cocking arm had reached its forward limit inside of the shooting mechanism. Both of these limit switches were connected with simple pulldown resistors to read a digital LO when the switch was not engaged, and a digital HI when the switch was pressed down.
