Drive Train
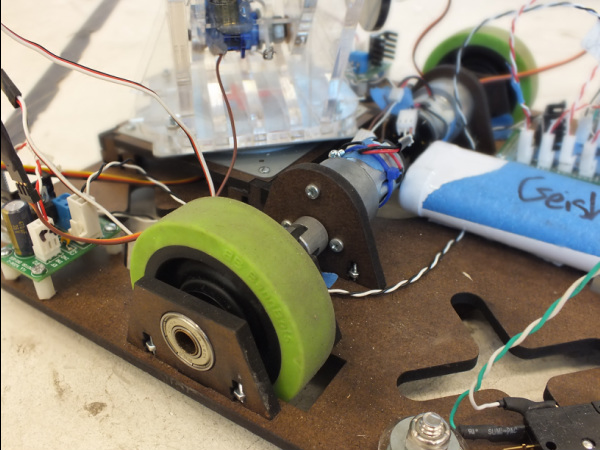
Our drive train consisted of two Igarashi 33GN2732 geared motors, which drove 2-2/8" diameter BaneBot wheels. To minimize friction, and take the load and any moments off of our motors, we supported our drive shaft by two ball bearings on either side of the wheels. The 3/8" drive shaft was coupled to the motors via spider couplers.
We chose to mount our motors along the center of our robot, so when we turned we could turn our robot in place since the wheels are along the center of rotation. To counter the robot tilting with the wheels in the center we mounted balled casters on the front and and back of our robot.
We chose to mount our motors along the center of our robot, so when we turned we could turn our robot in place since the wheels are along the center of rotation. To counter the robot tilting with the wheels in the center we mounted balled casters on the front and and back of our robot.
Bumpers
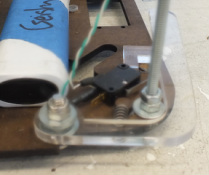
We detected were able to detect when we backed ito the power station by designing bumpers that could trigger limit switches on our bot. The bumpers utilized compression springs to provide a restoring force, so that they would not trigger our limit switches unless a true bump event had occurred. Since we had to drive with out assistance of the FAC for the last 12" to the loading zone, the bumpers along with a very even drive train allowed for us to navigate successfully with dead reckoning for the last 12". This combined with our ball loading design ensured proper ball loading every time
